
Description:
•Moteur: le moteur pas-à-pas reçoit ses impulsions du variateur de vitesse et déplace l'aimant par l'intermédiaire d'un poulie et d'une courroie crantée. •Variateur: il est muni de deux borniers: un pour les signaux de commande et un pour alimenter le moteur avec une séquence d'impulsions de puissance (phase A et B). Les signaux de la partie commande sont optocouplés et fonctionnent normalement sur le 5 volts. Dans notre cas nous utilisons du 24V d'où l'ajout de 3 résistances fixées sur le bornier. Nous avons 3 signaux de commande: pulse (pls), direction (dir) et enable (ena). La vitesse est déterminée par la fréquence d'entrée sur PLS et le ratio programmé par les Dip Sw 5,6,7, 8. Tel qu'ajusté, ces interrupteurs limite la vitesse maximum à une valeur sécuritaire.
Caractéristiques:
Variateur:
•Voltage d'alimentation: 24 Vcc •Courant de sortie: fixé à 1A max => Dip sw 1,2 et 3=ON •Courant de maintient: 1/2 du courant de sortie => Dip sw 4=OFF •Signaux de commande optocouplés. Actifs sur un 0. Alimentation 24Vcc avec résistance 2k en série avec l'entrée. Ne jamais enlever les résistances car vous endommagerez de façon permanente les optocoupleurs des signaux de commande.
•Step/révolution: 100 => Dip sw: 5=>ON, 6,7 et 8=>OFF  Configuration DIP SW
Moteur:
•NEMA 23, •Bipolaire,1.8°/step •Diamètre arbre: 6.4mm (.25 po) •Double arbre •4 Fils: rouge A+, blanc: A-, vert B+, noir B-
Branchement
Note: afin de limiter les problèmes de bruit, les câbles alimentant le moteur sont torsadés et reliés directement au bloc d'alimentation. Idéalement, le moteur devrait être alimenté par un bloc d'alimentation indépendant.
•%Q4 symbole ME (Motor Enable) Lorsque %Q4 (ME) est activé la sortie vers le moteur est désactivé, donc par défaut lorsque %Q4 est non activé la sortie moteur est active.
•%Q3 symbole MD (Motor Direction) Par défaut avec %Q3 inactif l'aimant se déplace vers la gauche (vue de face)
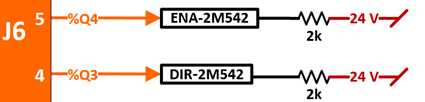
 Schéma électrique générique
•%MW201 symbole Frq (Frequency) 40-4095 =>sortie 100 Hz--10 kHz •JP1 sur la carte B-Flex doit être connecté •Valeur minimum pour un démarrage à l'arrêt 40 (0 à 40 aucun signal de sortie) •Valeur minimum en décélération 20 (4095 à 20)

•%MD0 symbole HSC (High Speed Counter) Note: %MD0 est un nombre double 32 bits 
Programmation:
❖On varie la vitesse en changeant la fréquence: écrire une valeur entre 40 et 4095 dans %MW401 (Frq) ❖Le variateur doit être Enable (valeur par défaut) ❖On change la direction en changeant l'état de %Q3 (MD) ❖La position de référence 0 est déterminée par l'aimant qui active le Home Position Sensor (HPS). Remettre à 0 le HSC. Pour ce faire écrire 12 dans %MW200, remettre 4 pour compter. ❖Pour connaître la position de l'aimant en déplacement, lire %MD0 HSC
Exemples:
 Retour à la position initiale
 Positionnement
|



